

Погнали знакомиться с нашим проектом!
НАША КОМАНДА:
Супер люди, которые создавали этот проект всю смену
Промышленный дизайнер, SMM-специалист
Рябкова Полина
Федер Богдан
3D-художник-конструктор
Программист, алгоритмик
Феофанов Илья
Строков Дмитрий
Инженер-схемотехник
Руководитель проекта
Григоров Максим
Руководитель проекта
Кульминский Данил
АКТУАЛЬНОСТЬ
И ЦЕЛЕВАЯ АУДИТОРИЯ
И ЦЕЛЕВАЯ АУДИТОРИЯ
За последние 3 года увеличилось количество людей с отсутствием конечностей из-за начала специальной военной операции. Многие солдаты лишаются не только рук, но и ног и остаются инвалидами.
Также есть взрослые и дети, которые остались без конечностей, которым приходится покупать протезы, чтобы оставаться жизнеспособным
Также есть взрослые и дети, которые остались без конечностей, которым приходится покупать протезы, чтобы оставаться жизнеспособным
2023
2024
2022
*Статистика выдачи протезов с 2022 по 2024 год
С каждым годом растёт спрос на протезы.
Ампутация кисти составляет 61 %
от количества ампутаций верхних конечностей
ПРОБЛЕМА И БОЛЬ НАШЕГО ПРОЕКТА
Современные бионические протезы кистей работают либо по упрощённой схеме с бинарным управлением (сжата / разжата), либо под управлением сигналов электромиограммы, но существующие решения не свободны от ограничений в естественности движений и функциональности.
Механическое управление
Под управлением сигналов электромиограммы
Человеческая обратная связь
Сенсорная
обратная связь
обратная связь
Управление протезом
Схемка про виды протезов
НАША ЦЕЛЬ
Разработать прототип системы сенсорной обратной связи бионического протеза конечности на адаптивных алгоритмах управления, повышающих точность, естественность и эффективность движений пользователя
ЗАДАЧИ
Мы поставили перед собой несколько задач, которые мы должны выполнить до конца смены
Проанализировать существующие решения
Разработать адаптивные алгоритмы управления
Наша задача — создать настолько умный алгоритм управления, который сможет достичь максимальной естественности движений, при этом пользователь ничего не чувствует. Алгоритм как бы «очеловечивает» чувствительность, анализируя данные с сенсоров и самостоятельно принимая решение о силе и характере захвата
Разработать конструкцию и дизайн прототипа
Наш текущий прототип сделан из прочного пластика, который отлично подходит для испытаний. Мы убеждены, что протез должен быть не только функциональным, но и эргономичным, и эстетически привлекательным.
Интегрировать алгоритмы управления в прототип и провести испытания
ЗАДАЧИ
Мы поставили перед собой несколько задач, которые мы должны выполнить до конца смены
Проанализировать существующие решения
Разработать адаптивные алгоритмы управления
Наша задача — создать настолько умный алгоритм управления, который сможет достичь максимальной естественности движений, при этом пользователь ничего не чувствует. Алгоритм как бы «очеловечивает» чувствительность, анализируя данные с сенсоров и самостоятельно принимая решение о силе и характере захвата
Разработать конструкцию и дизайн прототипа
Наш текущий прототип сделан из прочного пластика, который отлично подходит для испытаний. Мы убеждены, что протез должен быть не только функциональным, но и эргономичным, и эстетически привлекательным.
Интегрировать алгоритмы управления в прототип и провести испытания
ПРЕДЛАГАЕМОЕ РЕШЕНИЕ


Система использует обратную связь для сжатия различных объектов с оптимальной силой.
- Адаптивное управление на основе обратной связи
Датчики можно прикрепить к любой мышце, так как благодаря калибровки в начале работы протеза, он легко настраивается под каждого человека. Это полезно, так как у всех разное разное мышечное поражение, толщина кожи и проводимость.
- Гибкая персонификация алгоритма работы
Наш протез прост в конструкции и использовании.
- Простота конструкции прототипа
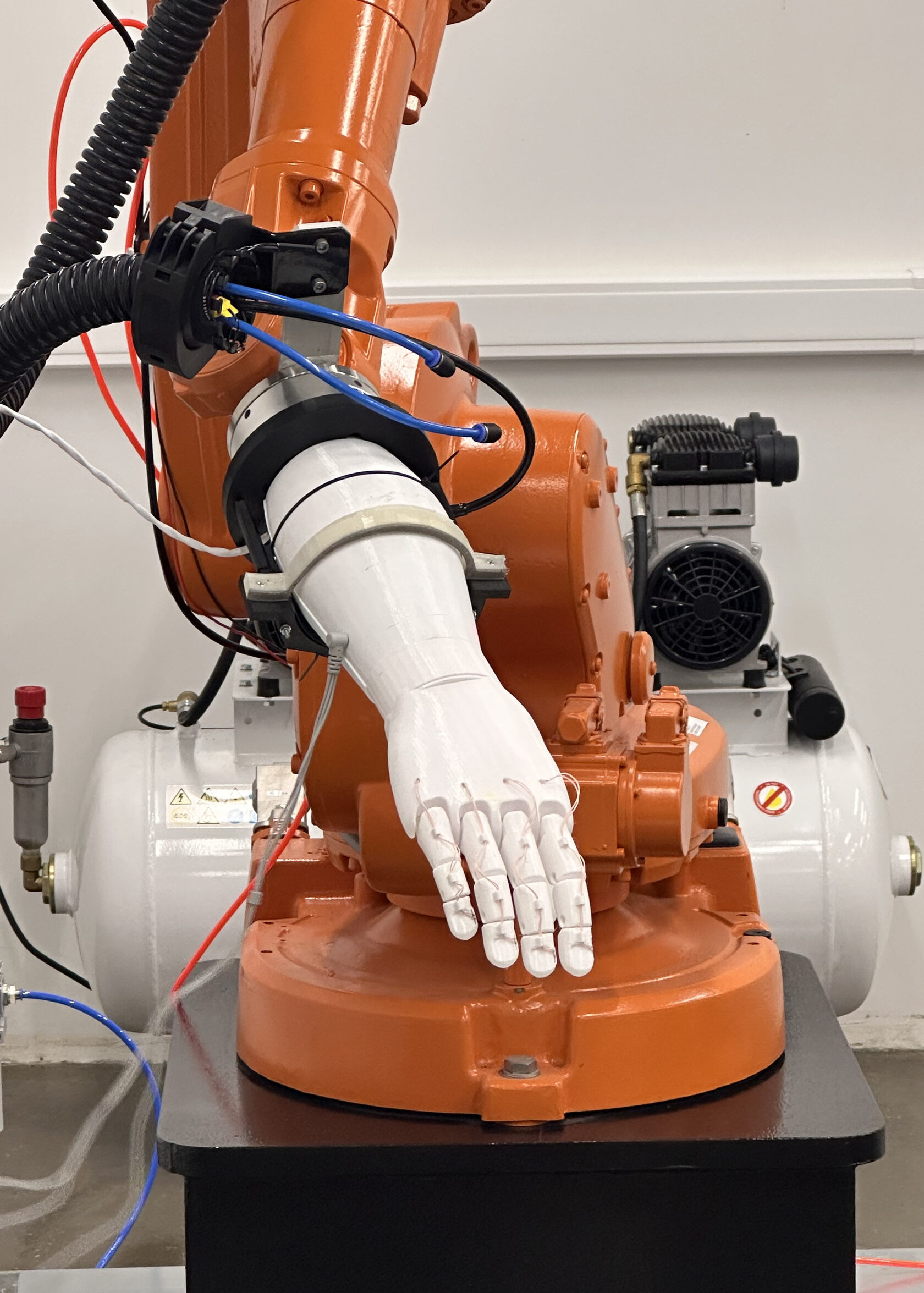
НАШИ РЕЗУЛЬТАТЫ
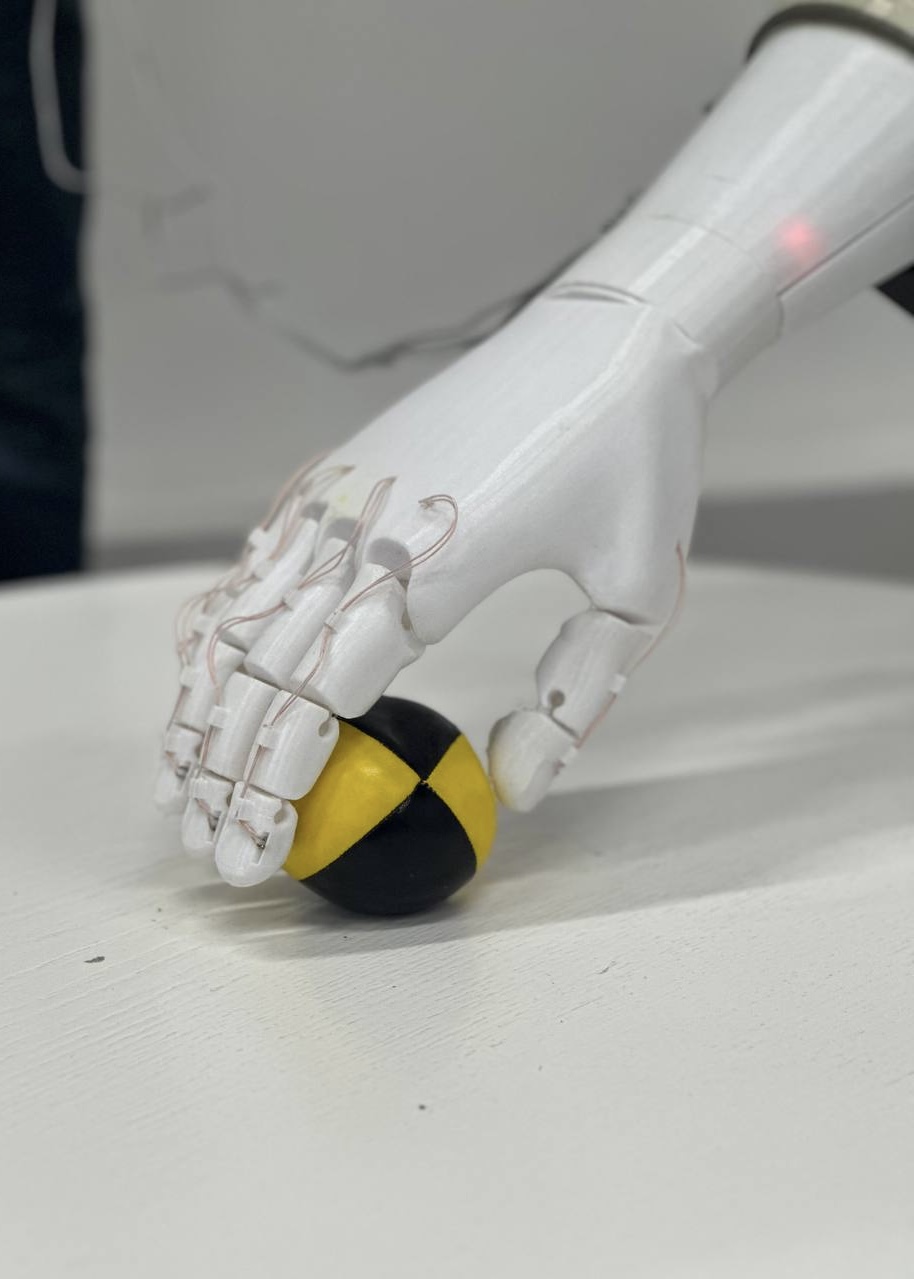
Перед вами наш результат — механический прототип протеза. Мы спроектировали и собрали кисть, используя сервоприводы для управления движением каждого пальца.

При включении выполняется калибровка для определения пределов активности мышц. Далее ЭМГ-сигналы циклично обрабатываются фильтром Калмана, нормализуются с учётом активности мышц и поступают в ПИД-регулятор. Одновременно данные с датчиков давления фильтруются, суммируются с учётом весовых коэффициентов (для задания приоритета пальцам) и усредняются, после чего также передаются в ПИД-регулятор.
ПИД-регулятор поддерживает заданное мышечное усилие (по ЭМГ) на датчиках давления, отправляя сигналы на сервоприводы. Те воздействуют на объект, обновляя показания датчиков давления, обеспечивая непрерывную работу алгоритма.
ПИД-регулятор поддерживает заданное мышечное усилие (по ЭМГ) на датчиках давления, отправляя сигналы на сервоприводы. Те воздействуют на объект, обновляя показания датчиков давления, обеспечивая непрерывную работу алгоритма.
АЛГОРИТМ УПРАВЛЕНИЯ





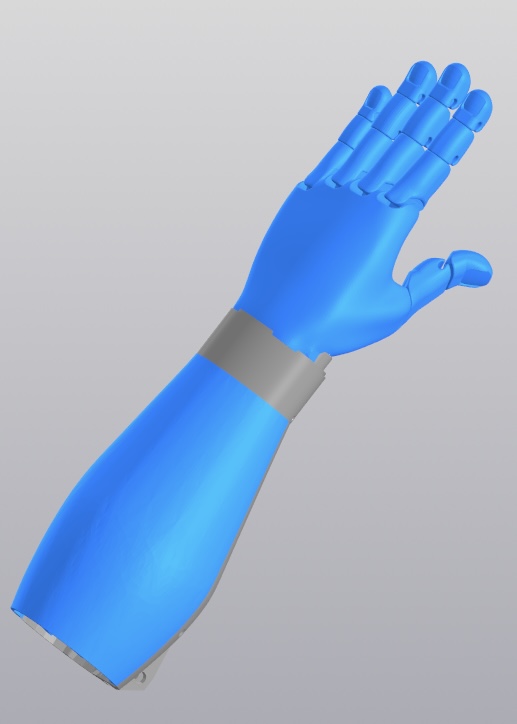
ДИЗАЙНЕРСКАЯ ПРОРАБОТКА
Важно отметить, что в нашей команде есть специалист по промышленному дизайну.
Мы убеждены, что протез должен быть не только функциональным, но и эргономичным,
и эстетически привлекательным.
Цвета протеза могут быть разные, всё зависит от желания пользователя. Человек не должен его стесняться. Внешний вид и удобство — это важная часть психологической адаптации, и мы уделяем этому огромное внимание.
Мы убеждены, что протез должен быть не только функциональным, но и эргономичным,
и эстетически привлекательным.
Цвета протеза могут быть разные, всё зависит от желания пользователя. Человек не должен его стесняться. Внешний вид и удобство — это важная часть психологической адаптации, и мы уделяем этому огромное внимание.
ФОТООТЧЁТ
Наши прекрасные фоточки!
ФОТООТЧЁТ
Наши прекрасные фоточки!